Szénkefe nélküli egyenáramú (BLDC) motorok vezérléstervezésének gyors elkezdése nagy integráltságú IC-k használatával
Contributed By DigiKey's North American Editors
2021-11-02
A mechanikus rendszerek elektronikus vezérlése felé való egyre gyorsabb elmozdulásnak köszönhetően, amelyet nagyrészt a dolgok internete (IoT) és a gépkocsik villamosítása ösztönöz, a tervezők egyre többször kis teljesítményű villanymotorokat használnak az egyszerűbb feladatokra a háztartási készülékektől kezdve az ajtózárakon és a távirányítású redőnyökön át az autók egyes alkatrészeiig (szivattyúk, ülések, ablakok, ajtók stb.) terjedő számos felhasználási területen. Ezek az egyenáramú motorok, amelyek teljesítménye a töredék lóerőktől több lóerőig terjed, mindenütt jelen vannak, de gyakran nem látjuk őket.
Miközben a villanymotorok fejlesztése, valamint a jobb és könnyebben használható motorvezérlési technika segíti ezt a gyors elterjedést, a tervezőkre továbbra is folyamatos nyomás nehezedik a hatékonyság javítása és a költségek csökkentése, valamint a nagyobb pontosság és megbízhatóság elérése érdekében.
A szénkefe nélküli egyenáramú (BLDC) motorok és a léptetőmotorok (a szénkefe nélküli egyenáramú motorok egy másik típusa) különféle változatai segíthetnek a tervezőknek az egyre szigorúbb teljesítmény- és költségcélok elérésében, de csak a motorvezérlő egység és a motorvezérlő áramkörök alapos átgondolása esetén. A vezérlőegységnek megfelelő vezérlőjeleket kell szolgáltatnia a motor elektronikus vezérlőkapcsolóinak (amelyek általában MOSFET-ek), mégpedig gondosan beállított időzítéssel és időtartamban. A motor gyorsulási és lassulási görbéjét is szabályoznia kell, valamint fel kell ismernie és kezelnie kell a motort és a terhelést érintő elkerülhetetlen szoftverproblémákat és hardverhibákat is.
Ez a cikk a BLDC motorokhoz szánt vezérlő integrált áramkörök (IC-k) által kínált funkciókat vizsgálja. Általános áttekintést nyújt a BLDC motorok villamos jellemzőiről, és elmagyarázza, hogy a korszerű vezérlőegységek hogyan teszik lehetővé, hogy a BLDC motorok a Renesas cég RAJ306010 sorozatú motorvezérlő IC-i segítségével megfeleljenek az alkalmazási célkitűzéseknek.
A motor vezérlési útvonala és a villanymotor
A mozgásvezérlő szoftvertől a motorig vezető út a szoftvert futtató processzorból, a motor áramellátást kapcsoló eszközeinek kapuvezérlőiből és magából a villanymotorból áll (1. ábra). Lehet még egy olyan útvonal is, amely a motor kimenetén lévő érzékelőtől egy analógbemenőjel-formázó áramkörön (AFE) át visszavezet a processzorhoz, adatokat szolgáltatva a motor forgórészének helyzetéről vagy fordulatszámáról, igazolva a teljesítményt és zárva a visszacsatoló áramkört.
") 1. ábra: A korszerű motorvezérlés a processzorba belső vezérlőprogramként (firmware-ként) beágyazott szoftverrel kezdődik, amely a kapuvezérlőket vezérli, azok pedig ennek hatására áramot kapcsolnak a motor tekercseire. Lehet ezenkívül egy érzékelővel vezérelt visszacsatolási hurok is a motortól vissza a processzorhoz (kép: Renesas)
1. ábra: A korszerű motorvezérlés a processzorba belső vezérlőprogramként (firmware-ként) beágyazott szoftverrel kezdődik, amely a kapuvezérlőket vezérli, azok pedig ennek hatására áramot kapcsolnak a motor tekercseire. Lehet ezenkívül egy érzékelővel vezérelt visszacsatolási hurok is a motortól vissza a processzorhoz (kép: Renesas)
A tervezők két főbb lehetőség közül választhatnak szénkefe nélküli egyenáramú motort: ezek a BLDC motor és a léptetőmotor. Mindkettő a belső állandó mágnesek és az elektromágneses tekercsekre kapcsolt áram indukálta mágneses tér közötti mágneses kölcsönhatás révén működik. Azt, hogy a kettő közül melyiket érdemes választani, a tervezett felhasználási módhoz kapcsolódó előnyeik és hátrányaik határozzák meg.
Általánosságban elmondható, hogy a BLDC motorok rendkívül megbízhatóak, jó hatásfokúak, és nagy nyomatékot képesek leadni széles fordulatszám-tartományban. A motor állórészének pólusai egymás után kapnak áramot, ami a(z állandó mágneseket tartalmazó) forgórészt elfordítja. A BLDC motorok állórésze jellemzően három a házban körben elhelyezett, elektronikusan vezérelt szegmensből áll (2. ábra).
 2. ábra: A BLDC motor állórészének szegmensei olyan sorrendben kapnak áramellátást, hogy az állandó mágneses forgórész elforduljon (kép: Renesas)
2. ábra: A BLDC motor állórészének szegmensei olyan sorrendben kapnak áramellátást, hogy az állandó mágneses forgórész elforduljon (kép: Renesas)
A BLDC motorok legfontosabb jellemzői közé tartozik a jó reagálási sebesség, a kiváló gyorsulás, a megbízhatóság, a hosszú élettartam, a nagy fordulatszámon működés és a nagy fajlagos teljesítmény. Gyakran használják őket olyan területeken, mint az orvosi berendezések, hűtőventilátorok, vezeték nélküli villamos szerszámok, lemezjátszók és automatizálási berendezések.
A léptetőmotor a BLDC motorokhoz hasonlóan működik, azzal a különbséggel, hogy sokkal kisebb elfordulásokat végez, egy teljes fordulatot nagyszámú (jellemzően 128 vagy 256) egyenlő szögű lépésre osztva. A motor forgórészét a folyamatos forgatás helyett sorrendi vezérléssel vezérlik, hogy ezen kis szögű lépésenként mozogjon vagy léptessen (3. ábra). Ez lehetővé teszi a forgórész pontos helyzetbe állítását, mert a forgórész szinkronba áll az áram alá helyezett álló állórésztekercsek pólusai által létrehozott mágneses térrel.
 3. ábra: A léptető mozgáshoz nagyszámú állórészpólus tartozik, amelyek a forgórész és annak állandó mágnesei körül helyezkednek el. Ezeknek a pólusoknak a szabályozott sorrendben történő gerjesztésével a forgórész kis szögértékenként fordul el és lépked. (kép: Renesas)
3. ábra: A léptető mozgáshoz nagyszámú állórészpólus tartozik, amelyek a forgórész és annak állandó mágnesei körül helyezkednek el. Ezeknek a pólusoknak a szabályozott sorrendben történő gerjesztésével a forgórész kis szögértékenként fordul el és lépked. (kép: Renesas)
A léptetőmotorok megbízhatóak, pontosak, kiváló gyorsulást és jó reagálási sebességet kínálnak. Léptetéses működésük és a motor kialakítása miatt a nyílt hurkú vezérlés és a helyzetbeállítás stabilitása gyakran elegendő még az olyan nagy pontosságot igénylő alkalmazási területekre is, mint a CD-meghajtók, a síkágyas lapolvasók, a nyomtatók és a rajzgépek. Az igényesebb felhasználási területeken a még nagyobb pontosság és a működés ellenőrzése érdekében visszacsatoló érzékelővel és zárt hurkú vezérléssel is elláthatják a léptetőmotorokat.
A BLDC motorok vezérlési lehetőségei
A váltakozó áramú indukciós és az egyenáramú szénkefés motorokkal ellentétben, ahol a fordulatszám és a nyomaték szabályozásának elsődleges módja a tápfeszültség beállítása, a BLDC motorok vezérlése az áramellátást rákapcsoló MOSFET-ek nyitásának és zárásának (be- és kikapcsolásának) gondos időzítésével történik. Ez lehetővé teszi, hogy a motor hatékonyan és pontosan oldja meg a legkülönbözőbb feladatokat.
Ezek a követelmények terjedhetnek a vezeték nélküli porszívók szívóerejének megteremtéséhez elengedhetetlen nagy levegőmennyiség-mozgatáshoz szükséges nagy fordulatszám biztosításától kezdve a villamos kéziszerszámokig, amelyeknek nagy indítási nyomatékkal kell rendelkeziük, különösen arra az esetre, ha a motor a túl nagy terhelés hatására megakad. A motornak számos felhasználási területen képesnek kell lennie a nagy terhelésváltozások elviselésére is, amikor az állandó fordulatszám fenntartásához rövid reakcióidőre van szükség.
A BLDC motorok vezérlésére vannak szokványos módszerek: a hagyományos 120⁰-onkénti be-ki kapcsolásos vezérlés és a vektoros vezérlés. A 120⁰-onkénti be-ki kapcsolásos vezérlésnél a BLDC motor három tekercséből mindig kettő van áram alatt, és a vezérlőegység hat gerjesztési mintát kapcsolgat egymás után a forgásiránynak megfelelő sorrendben, hogy létrehozza a forgó mozgást egyik vagy másik irányban (4. ábra).
") 4. ábra: A BLDC motor állórészének pólusai (balra) gerjeszthetők balra vagy jobbra haladva (jobbra), így a forgórészt a feladat által megköveteltek szerint mindkét irányban lehet forgatni (kép: Renesas)
4. ábra: A BLDC motor állórészének pólusai (balra) gerjeszthetők balra vagy jobbra haladva (jobbra), így a forgórészt a feladat által megköveteltek szerint mindkét irányban lehet forgatni (kép: Renesas)
Ebben az üzemmódban az állórésztekercseket az áram rá- és lekapcsolásával (négyszöghullámmal) gerjesztik, ami trapéz alakú gyorsulási profilt eredményez, ahogy a motor gyorsul, tartja a fordulatszámot, majd az áramnak a tekercsekről való lekapcsolásakor lassul. Ennek a megközelítésnek az előnye a benne rejlő egyszerűség és a könnyű kezelhetőség.
Az így vezérelt motor azonban a terhelés és egyéb tényezők változásaira érzékenyen, a teljesítmény ingadozásával reagál, és egyes felhasználási területekhez nem elég jó a pontossága és a hatásfoka. A motorvezérlő egység korszerű algoritmusaival bizonyos mértékig kiküszöbölhetők ezek a problémák a MOSFET nyitási és zárási időzítésének megfelelő beállításával, valamint az arányos-integrált-derivált (PID) vagy arányos-integrált (PI) vezérlés használatával.
A másik, egyre inkább elterjedőben lévő megoldás a vektoros vezérlés vagy más néven térirányvezérlés (FOC, field-oriented control). Ennél a megoldásnál mindhárom tekercs folyamatosan kap áramot, ezzel folyamatosan vezérli a forgó mágneses tér irányát, ami a 120⁰-onkénti vezérléshez képest simább, egyenletesebb mozgást eredményez. A térirányvezérlés mára olyan szintre fejlődött, hogy számos tömegpiaci termékben, például mosógépekben is alkalmazzák.
A térirányvezérlésben az egyes állórésztekercsek áramát fejlett algoritmusok mérik és szabályozzák, ami bonyolult digitális feldolgozást igényel. Az algoritmusnak folyamatosan kétfázisú egyenáramértékekké kell alakítania a háromfázisú váltakozóáram-értékeket (ezt a folyamatot koordináta-fázis átalakításnak nevezik), ami egyszerűsíti a szabályozáshoz szükséges későbbi egyenleteket és számításokat (5. ábra). A térirányvezérlés eredménye, ha megfelelően van végrehajtva, rendkívül pontos és hatékony a vezérlés.
 5. ábra: A térirányvezérlési algoritmus egy része a bonyolult digitális feldolgozási számítások egyszerűsítéséhez koordináta-fázis átalakítást igényel (kép: Renesas)
5. ábra: A térirányvezérlési algoritmus egy része a bonyolult digitális feldolgozási számítások egyszerűsítéséhez koordináta-fázis átalakítást igényel (kép: Renesas)
Visszacsatolásra használható érzékelők
A BLDC motorok vezérelhetők visszacsatoló jel nélküli, nyílt hurkú elrendezésben, illetve zárt hurkú algoritmuson keresztül, a motoron lévő érzékelőtől kapott visszacsatolással. A döntés a termék pontosságától, elvárt megbízhatóságától és biztonsági szempontjaitól függ.
A visszacsatoló érzékelő hozzáadása növeli a költségeket és az algoritmus bonyolultságát, de növeli a számításokba vetett bizalmat is, így számos esetben nélkülözhetetlen. A mozgás leglényegesebb paramétere terméktől függően a forgórész helyzete vagy a fordulatszám. Ez a két tényező szorosan összefügg: a fordulatszám a helyzet időbeli deriváltja, a helyzet pedig a fordulatszám időbeli integrálja.
Valójában majdnem minden visszacsatoló érzékelő jelzi a helyzetet, és a vezérlőegység használhatja a jelüket közvetlenül, vagy a fordulatszám meghatározásához kiszámíthatja a jelek deriváltját. Egyszerűbb esetekben a visszacsatoló érzékelő elsődleges szerepe a motor alapteljesítményének biztonsággal kapcsolatos ellenőrzése vagy a megakadás jelzése, nem pedig a zárt hurkú vezérlés.
Általában négyféle visszacsatoló érzékelőt használnak: Hall-elemeket, optikai kódolókat, rezolvereket és induktív érzékelőket (6. ábra). Mindegyik más-más teljesítményjellemzőket és felbontást kínál, és más költségvonzattal jár.
 6. ábra: A felhasználóknak az érzékelők széles választéka áll rendelkezésére, ha a rendszerükben villanymotor-visszacsatolási jelre van szükség, a Hall-elemektől kezdve a kódolókon és a rezolvereken az indukciós érzékelőkig (kép: Renesas)
6. ábra: A felhasználóknak az érzékelők széles választéka áll rendelkezésére, ha a rendszerükben villanymotor-visszacsatolási jelre van szükség, a Hall-elemektől kezdve a kódolókon és a rezolvereken az indukciós érzékelőkig (kép: Renesas)
A Hall-elemek általában a legegyszerűbb és legkönnyebben beszerelhető eszközöknek számítanak, és sok esetben megfelelőek. Optikai kódolók az alacsonytól a mérsékelten magasig sokféle felbontással kaphatók, de a beszerelésük nehézségekbe ütközik, és hosszú távon a megbízhatóságukkal kapcsolatban is lehetnek aggályok. A rezolverek és az induktív érzékelők nagyobbak, nehezebbek, költségesebbek, és némi illesztési gondot is jelenthetnek, de nagyon nagy felbontást és hosszú távon is jó teljesítményt kínálnak.
Áramellátás
A szénkefe nélküli motorok pólusai – akár BLDC motorokról, akár léptetőmotorokról beszélünk – elektromágneses „tekercsek”, ezért nem feszültséggel, hanem árammal kell vezérelni őket. Ahhoz, hogy a motort megfelelően és hatékonyan lehessen vezérelni, ezeknek a pólusoknak a megfelelő áramellátásához a motorvezérlő rendszernek ezt az áramot rá- és lekapcsoló (be-ki kapcsoló) kapcsolókon (amelyek a legtöbb esetben MOSFET-ek) keresztül kell biztosítania, pontos időzítéssel és impulzusszélességgel, valamint szabályozott fel- és lefutóél-meredekséggel. A vezérlés kialakításának a MOSFET-eket is védenie kell a különböző hibaállapotok, például a motormegakadás, a túl nagy áramigény, hőtúlterhelés és rövidzár ellen.
A viszonylag kisméretű, jellemzően 500 mA és 1 A közötti gerjesztőáramot igénylő motorok esetében a MOSFET-ek kapuvezérlőit és akár még magukat a MOSFET-eket is be lehet építeni a motorvezérlő integrált áramkörbe (IC), hogy minél kisebb legyen a motorok helyigénye. Bár ez kényelmes, és leegyszerűsíti a tervezést, sok esetben több okból sem praktikus választás:
- A nagy teljesítményű MOSFET-ek félvezetős technológiai megoldásai nagyon különböznek a vezérlőegység digitális logikájához használt technológiáktól, így a kombináció végső kialakítása kompromisszumokkal jár (de elfogadhatóakkal).
- A MOSFET-ek hőtermelését és hűtését nagymértékben a termék teljesítményigénye határozza meg. Az áram- és teljesítményszintek növekedésével a lapkában elhelyezett MOSFET-ek hőtermelése és a keletkező hő gyorsan meghaladhatja a tok határértékeit. Ezekben az esetekben jobb megoldás a digitális és a teljesítményfunkciók szétválasztása, ami lehetővé teszi a tervező számára a MOSFET-ek elhelyezésének és hűtésének optimalizálását.
- Végül pedig, ahogy a motor által igényelt áramszintek növekednek, problémává válhat az IR tényező (azaz az ellenálláson átfolyó áram) által a motor tápvezetékeiben okozott feszültségesés növekedése. Ennek következtében a kapcsolóeszközöket célszerű a terheléshez közelebb elhelyezni.
Ezen okok miatt sok motor- és mozgásvezérlő IC tartalmazza az összes szükséges funkciót, csak a teljesítmény-MOSFET-eket nem. A több MOSFET-et tartalmazó áramköri elrendezést gyakran inverterfunkciónak nevezik. A diszkrét MOSFET-ek használata rugalmasságot biztosít a tervező számára, hogy a megfelelő értékeket kombinálva válasszon áramköri elemeket, olyan tényezőket figyelembe véve, mint a terhelőáram, a bekapcsolt állapotban jelentkező ellenállás, a toktípus és a kapcsolási karakterisztikák.
A korszerű IC-k megfelelnek a motorvezérlési igényeknek
Régebben a magas szintű motorvezérléshez több IC kombinációjára volt szükség. Ennek jellemzően része lehetett egy olcsóbb és egyszerűbb processzor az általános parancsok kiadására és egy hozzá kapcsolódó célorientált digitális társprocesszor a szükséges algoritmusok végrehajtására, vagy egy drága és jó minőségű processzor mindkét feladatra, valamint mindkét esetben az áramellátó egységek kapuvezérlő áramkörei. Ehhez nemcsak nagyobb alapterületű nyomtatott áramköri (nyák) lapra és több alkatrészre volt szükség, hanem gyakran rendszer-összeépítési és ahhoz kapcsolódó hibakeresési problémák is felmerültek.
A mai motorvezérlő IC-k azonban képesek mindezt egyetlen eszközben megvalósítani, ahogyan azt a Renesas RAJ306010 blokkvázlata is mutatja (7. ábra). Az RAJ306010 jelű IC-n belül számos olyan funkcionális blokk található, amelyek kifejezetten a motorvezérlés egyedi igényeit célozzák meg.
") 7. ábra: A Renesas RAJ306010 jelű IC rendelkezik a rendkívül magas szintű motorvezérléshez szükséges összes funkcióval (a teljesítmény-MOSFET-ek kivételével), és így kevesebb helyet foglal, mint egy több IC-t tartalmazó megoldás, miközben csökkenti mind az alkatrész-, mind az összeépítési igényt (kép: Renesas)
7. ábra: A Renesas RAJ306010 jelű IC rendelkezik a rendkívül magas szintű motorvezérléshez szükséges összes funkcióval (a teljesítmény-MOSFET-ek kivételével), és így kevesebb helyet foglal, mint egy több IC-t tartalmazó megoldás, miközben csökkenti mind az alkatrész-, mind az összeépítési igényt (kép: Renesas)
Ezt az általános célú motorvezérlő IC-t háromfázisú, szénkefe nélküli egyenáramú (BLDC) motorokhoz tervezték. Egy apró, 8 × 8 mm-es, 64 érintkezős QFN tokban van elhelyezve, amelyben egyesít és szorosan összekapcsol két teljesen eltérő szerepkört: a digitális vezérlőegység és a többnyire analóg elővezérlő egység funkcióját. 6–24 V-os tápfeszültségről működik, és olyan önálló, nagyrészt egyedileg használt termékekbe szánták, mint a kerti szerszámok és villamos kéziszerszámok, porszívók, nyomtatók, ventilátorok, szivattyúk és a robotika. (Itt jegyezzük meg, hogy az egyébként csaknem azonos RAJ306001 egy 6–30 V-os változat, amelynek egyébként ugyanazok a műszaki adatai, mint az RAJ306010-éi.)
A digitális részen a RAJ306010 egy 16 bites mikrovezérlőt (Renesas RL78/G1F osztály) tartalmaz, amelyet 64 kB (kilobájt) flash ROM, 4 kB adat-flash ROM és 5,5 kB RAM támogat. Ezen kívül jelentős mennyiségű digitális be- és kimenet (I/O) áll rendelkezésre: általános célú be- és kimenet (GPIO), SPI, I2C és UART. Egy kilenccsatornás, 10 bites analóg-digitális átalakító (ADC) is található benne, amelyen át analóg jeleket lehet bejuttatni az eszközbe.
A RAJ306010 használatához a rendszertervező a kívánt működési paramétereket a megfelelő flashmemóriás vezérlőregiszterekbe tölti be a kívánt működési módok és feltételek beállításához. Az IC ezután bekapcsoláskor további mikrovezérlő nélkül is működőképes, amint alább egy jellegzetes készülék magas szintű rendszerblokkvázlatán is látható (8. ábra).
 8. ábra: Ennek a RAJ306001 IC-t használó egyszerű készüléknek a magas szintű rendszerblokkvázlatán látható, hogy a nagy integráltsági foknak köszönhetően minimális számú további diszkrét alkatrészre van csak szükség (kép: Renesas)
8. ábra: Ennek a RAJ306001 IC-t használó egyszerű készüléknek a magas szintű rendszerblokkvázlatán látható, hogy a nagy integráltsági foknak köszönhetően minimális számú további diszkrét alkatrészre van csak szükség (kép: Renesas)
Az RAJ306010 analóg része tartalmaz három félhidas kapuvezérlőt állítható, akár 500 mA-es kapuvezérlő csúcsárammal, önszabályozó holtidő-generátor funkciót a híd tápfeszültség-rövidrezárásának és emiatti károsodásának megakadályozására, egy áramérzékelő erősítőt és egy elektromotorosellenerő- (back EMF-, BEMF-) erősítőt. Egy beépített töltésszivattyú akár 13 V-ra is képes növelni a kapuvezérlés feszültségét, ha leesne a tápfeszültség.
Az IC közvetlenül támogatja a Hall-elemes érzékelőket, és az analógbemenőjel-formázó áramkör (AFE) más típusú visszacsatoló érzékelők támogatására is használható. Mint minden jól megtervezett motorvezérlő egységnek, ennek is vannak védelmi funkciói is, beleértve a túlmelegedés elleni védelmet, a túlfeszültség és a feszültségesés miatti letiltást (UVLO), a túláram-érzékelést és a motorbeékelődés elleni védelmet.
A 9. ábrán látható példa azt mutatja, hogy a RAJ306010 könnyen kezel egy olyan egyszerű önálló készüléket, mint egy 24 V-os vezeték nélküli turmixgép, bár ez lehetne szinte bármilyen hasonló kisméretű készülék is. Lényeges megjegyezni, hogy az áramkörök nagy része a nyolccellás akkumulátor töltésére és kezelésére szolgál, míg a motorvezérléshez csak a vezérlő IC, a külső háromfázisú híd (inverter), egy visszacsatoló feszültségérzékelő áramkör (egy áramérzékelő ellenálláson keresztül) és a felhasználó által kezelt indítógomb szükséges.
") 9. ábra: Az RAJ306010 nagy funkcióintegráltsági fokát jól mutatja, hogy milyen kevés kiegészítő áramkörre és milyen kevés további alkatrészre van szükség egy olyan egyszerű készülék alapszintű motorvezérlő funkcióihoz, mint ez az akkumulátoros turmixgép (kép: Renesas)
9. ábra: Az RAJ306010 nagy funkcióintegráltsági fokát jól mutatja, hogy milyen kevés kiegészítő áramkörre és milyen kevés további alkatrészre van szükség egy olyan egyszerű készülék alapszintű motorvezérlő funkcióihoz, mint ez az akkumulátoros turmixgép (kép: Renesas)
A BLDC motorok vezérlése a gyakorlatban
Egy dolog megtervezni, szimulálni, értékelni és beállítani egy motorvezérlő alkalmazást „papíron” vagy számítógépen a teljes rendszer különböző modelljeit felhasználva. Más dolog azonban egy tényleges motor működtetése és a teljesítmény tesztelése fizikai alkatrészek és tényleges terhelések használatával a valós dinamika jelenlétében, valamint annak megismerése, hogy milyen hatása van a beállított kezdeti indítási feltételeknek és a különböző teljesítményparaméterek változásának.
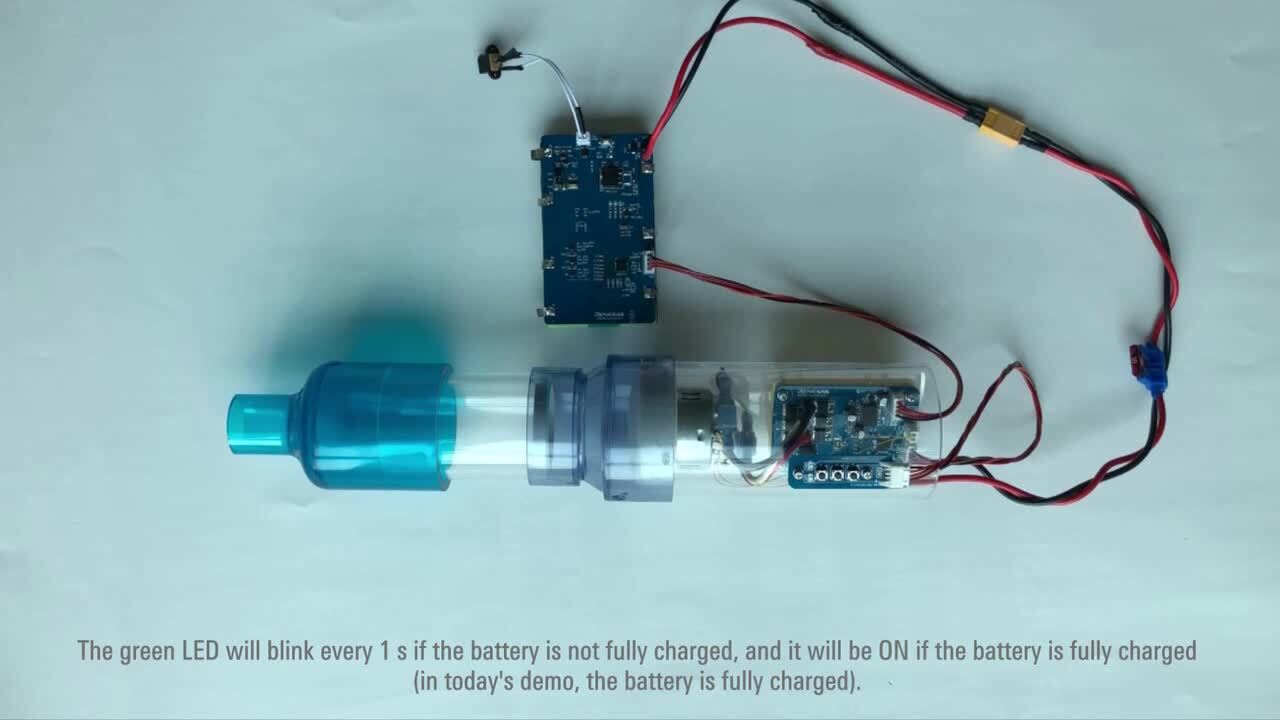
Ehhez létfontosságú eszköz a tervezőmérnökök számára a Renesas RTK0EML2C0S01020BJ motorvezérlő-értékelő rendszer (10. ábra), valamint a hibakeresést megkönnyítő Renesas Motor Workbench szoftveralkalmazás. Ez a szoftvereszköz lehetővé teszi a tervező számára, hogy megismerje a RAJ306010 működését, bemeneti és kimeneti üzemmódjait, valamint a különböző vezérlőregiszterek funkcióit.
 10. ábra: A RAJ306010 motorvezérlő IC használata esetén ez a Renesas RTK0EML2C0S01020BJ motorvezérlő-értékelő rendszer központi részét képező kártya a Renesas Motor Workbench szoftverrel együtt használva felgyorsítja a paraméterek finombeállítását és a motor teljesítményének értékelését (kép: Renesas)
10. ábra: A RAJ306010 motorvezérlő IC használata esetén ez a Renesas RTK0EML2C0S01020BJ motorvezérlő-értékelő rendszer központi részét képező kártya a Renesas Motor Workbench szoftverrel együtt használva felgyorsítja a paraméterek finombeállítását és a motor teljesítményének értékelését (kép: Renesas)
Annak érdekében, hogy a termékfejlesztési fázis még gyorsabban beinduljon, az értékelőrendszer tartalmaz egy 24 V/420 mA-es BLDC motort, amelynek üresjárati fordulatszáma 3900 f/perc és névleges nyomatéka 19,6 mNm (millinewtonméter) (ami 200 grammerő-centiméternek felel meg). Ezenkívül a Renesas szoftveres vezérlési rutinokat kínál mind az érzékelő nélküli, mind az érzékelőalapú vezérléshez.
Összegzés
Azoknak a tervezőknek, akik egyenáramú motorokat építenek be rendszereikbe, számos lehetőségük van a klasszikus szénkefés egyenáramú motorokon túl, mivel könnyen beszerezhetőek nagy teljesítményű, költségtakarékos BLDC motorok, amelyek kis méretben kínálnak nagy teljesítményt és pontosságot. Az ilyen BLDC motorokban rejlő lehetőségek teljes kihasználásához az intelligens vezérlőegységek tartalmazzák és a felhasználó által kívánt paraméterekkel végrehajtják a szükséges algoritmusokat. Emellett biztosítják a motor kapcsoló MOSFET-jeinek szükséges vezérlését, valamint a teljes motorvezérlési megoldáshoz megkívánt egyéb analóg be-és kimeneteket (I/O) is.
Mint látható, a Renesas RAJ306010-hez hasonló IC-k, amelyeket fejlesztőkészletek és szoftverek is támogatnak, nagymértékben leegyszerűsítik a nagy teljesítményű, kisméretű és egyben hatékony motorvezérlés megtervezése jelentette feladatokat olyan felhasználási területeken, mint a háztartási készülékek, autóülések és -ablakok, valamint számos más, ma már hétköznapinak számító berendezés.
Felhasznált forrásanyagok
- BLDC Motor Control Algorithms (Vezérlőalgoritmusok BLDC motorokhoz)
- RTK0EML2C0S01020BJ BLDC Motor Control Evaluation System for RAJ3060xx Motor Control ICs (RTK0EML2C0S01020BJ, BLDC motorok vezérlését értékelő rendszer RAJ3060xx motorvezérlő IC-khez)
- Application Note R01AN3786EJ0102, “Sensorless Vector Control for Permanent Magnet Synchronous Motor (Algorithm)” (R01AN3786EJ0102, Érzékelő nélküli vektoros vezérlés állandó mágneses szinkronmotorhoz (algoritmus) című felhasználásismertető dokumentum)
- Portable Power Tools Solution (Megoldás villamos kéziszerszámokhoz)
- 24V Cordless Blender (24 V-os, vezeték nélküli turmixgép)
- Motor Solutions: User-Friendly Motor Control Development Environment to Shorten Time to Market (Megoldások villanymotorokhoz: felhasználóbarát motorvezérlés-fejlesztési környezet a piacra kerülési idő lerövidítésére)
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.