Helymeghatározás gyors megvalósítása több konstellációs GNSS modulokkal
Contributed By DigiKey's North American Editors
2021-09-09
Az európai Galileo, az amerikai Globális Helymeghatározó Rendszer (GPS), az orosz GLONASS, a kínai BeiDou és a japán QZSS globális navigációs műholdrendszerekkel (GNSS) kompatibilis több konstellációs vevőkészülékekkel működő pozícióalapú funkciók használata egyre szélesebb körben terjed, többek között a robotika, az autonóm járművek, az ipari automatizálás, a logisztika és az eszközök nyomon követése, a drónok, valamint a mezőgazdasági és nehéz építőipari berendezések területén. A több konstellációs GNSS-vevők használatának előnyei többek között a következők: a helymeghatározó, navigációs és időzítési (position, navigation, timing, PNT) jelek jobb rendelkezésre állása, nagyobb pontosság és integritás, valamint az alkalmazások nagyobb robusztussága.
A több konstellációs vevőkészülékek fejlesztése azonban összetett és időigényes feladat, amely magában foglalja a következőket: az L-sávú antenna optimalizálását; a rádiófrekvenciás (RF) front end tervezését; az alapsávú jelfeldolgozó algoritmusok integrálását a különböző PNT-jelek felvételére, követésére és azok korrigálására; az alkalmazás feldolgozószoftverének megírását a PNT-adatoknak az alapsáv minden csatornájából történő kinyerésére és ezen információk felhasználására a rendszerfunkciók megvalósításához. A tervezőknek megfelelő antennát is ki kell választaniuk, és azt helyesen kell elhelyezniük.
Ennek alternatívája az, ha a tervezők előre elkészített GNSS modulokhoz és fejlesztői környezetekhez fordulnak, hogy a helymeghatározási képességet gyorsan és hatékonyan a rendszerbe integrálhassák. Ezek a GNSS modulok tartalmazzák az RF front-endet, az alapsáv-feldolgozást és a beágyazott firmware-t az alkalmazások feldolgozószoftvereinek fejlesztésének felgyorsítása érdekében. Egyes GNSS-modulok az antennákat is tartalmazzák.
Ez a cikk a GNSS, a PNT és a több konstellációs GNSS-vevők működésének alapjait tekinti át. Ezután megvizsgálja az antennák GNSS-modulokba történő integrálásának előnyeit és hátrányait, majd bemutat néhány integrált antennákkal rendelkező és anélküli GNSS-modult, valamint az STMicroelectronics, a Septentrio és a Würth Elektronik fejlesztői kártyáit, amelyek segítségével a tervezők pontos és megbízható pozícióalapú alkalmazásokat fejleszthetnek ki gyorsan és költséghatékonyan.
Mi a GNSS és a PNT?
A GNSS és a PNT egymással szorosan összefüggő fogalmak. A legtöbb PNT-jel a GNSS műholdakból származik. A GNSS műholdak lényegében nagy pontosságú, szinkronizált órák, amelyek folyamatosan sugározzák a saját PNT-adataikat. A GNSS-modulok egy-egy adott műhold PNT-jeleit fogadják, és abból számítják ki a műholdtól való távolságukat. Ha a vevő legalább négy műholdtól való távolságát ismeri, meg tudja becsülni saját helyzetét. A pozícióbecslés pontosságát azonban számos hibaforrás befolyásolja, többek között:
- a GNSS műholdak időmérő áramköreinél az órajel driftje;
- pontatlanságok a GNSS műholdak pontos pályapozícióinak előrejelzésében;
- a teljes műholdas berendezés általános működésének más műholdakhoz viszonyított eltérése, más néven a műholdak torzítása;
- a jeleknek az ionoszférán és a troposzférán való áthaladásuk során fellépő torzulások és késések;
- többutas visszaverődés és a vevő változó működése és driftje.
A tervezők számára különböző módszerek állnak rendelkezésre, amelyekkel a műholdas és a légköri GNSS-hibákat korrigálni tudják.
A GNSS működésének javítása
A GNSS-vevőből eredő hibák hatásának minimalizálására a legjobb módszer az adott alkalmazás költség- és méretbeli korlátozásainak megfelelő legnagyobb teljesítményű vevő használata. De még a nagy teljesítményű vevőkészülékek sem tökéletesek, teljesítményük nagy valószínűséggel javítható. Fontos megérteni ezeket a korrekciós módszereket, hiszen segítségükkel eltérő működésbeli teljesítmény érhető el, és egyes GNSS-moduloknál nem mindegyikük implementálható.
Számos GNSS-korrekciós módszer épül a földi referenciaállomások használatára (1. ábra). A legelterjedtebb módszerek, amelyek földi referenciaállomások használatával biztosítják a vevőkészülékek számára a GNSS-korrekcióikat a valós idejű kinematika (Real-Time Kinematic, RTK) és a pont alapú pontos pozicionálás (Precise Point Positioning, PPP). Az utóbbi időben hibrid RTK-PPP módszerek is megjelentek.
 1. ábra: Egy felhasználó oldali GNSS vevő a helymeghatározás pontosságának javítása érdekében információkat kaphat a referenciahálózatból a légköri-, az órajelbeli- és a pályahibákat illetően. (Kép: Septentrio)
1. ábra: Egy felhasználó oldali GNSS vevő a helymeghatározás pontosságának javítása érdekében információkat kaphat a referenciahálózatból a légköri-, az órajelbeli- és a pályahibákat illetően. (Kép: Septentrio)
Az RTK egyetlen bázisállomásra vagy egy helyi referenciahálózatra támaszkodik a korrekciós adatok tekintetében, amelyek képesek kiküszöbölni a GNSS-hibák nagy részét. Az RTK esetén feltételezett, hogy a bázisállomás és a vevő közel van egymáshoz (legfeljebb 40 kilométerre vagy 25 mérföldre), tehát ugyanazokat a hibákat tapasztalják. Az utófeldolgozott kinematika vagy PPK (Post-Processed Kinematic) az RTK egy változata, és széles körben használják a földmérés és a térképezés során, hogy nagy pontosságú pozicionálási adatokat vagy centiméteres pontosságot kapjanak.
A PPP-korrekciókhoz csak a pálya- és a műholdórajel hibáit használják fel. Ezek a műholdspecifikus hibák függetlenek a felhasználó tartózkodási helyétől, ami miatt csak korlátozott számú referenciaállomásra van szükség. A PPP esetén azonban a légkörrel kapcsolatos hibák nincsennek figyelembe véve, ezért pontossága az RTK-hoz képest alacsonyabb. Ezenkívül a PPP-korrekciók inicializálási ideje körülbelül 20 perc is lehet. A hosszabb inicializálási idő és az alacsonyabb pontosság miatt a PPP sok alkalmazásban nem használható.
Az RTK-közeli pontosságot és gyors inicializálási időt igénylő alkalmazásoknál gyakran használják a legújabb GNSS korrekciós szolgáltatást, az RTK-PPP-t (amelyet néha állapot-tér reprezentációnak (state-space representation, SSR) is neveznek). Ez egy GNSS-adatokat gyűjtő referenciahálózatra épül, amelynek állomásai mintegy 100 km (65 mérföld) távolságra vannak egymástól, és amely műholdas és légköri korrekciók kombinációját számítja ki. A referenciahálózat az internetet, a műholdas vagy mobiltelefon-hálózatot használja a korrekciós adatoknak az előfizetőkhöz való eljuttatására. Az RTK-PPP-t használó GNSS-vevőkészülékek esetében deciméter alatti pontosság érhető el. Az, hogy a tervező az RTK, a PPP vagy a RTK-PPP korrekciós módszert választja mindig egy sor tervezési kompromisszummal jár, amelyeket a fejlesztőknek felül kell vizsgálniuk, hogy kiválaszthassák az adott alkalmazási profilhoz optimális megoldást (2. ábra).
 2. ábra: Három elterjedt GNSS-korrekciós módszer előnyei és hátrányai. (Kép: Septentrio)
2. ábra: Három elterjedt GNSS-korrekciós módszer előnyei és hátrányai. (Kép: Septentrio)
A földi állomásokon alapuló RTK, PPP és RTK-PPP korrekciós módszerek helyettesítésére regionális szinten kezdenek elérhetővé válni a műholdas kiegészítő rendszerek (satellite-based augmentation system, SBAS). Az SBAS továbbra is földi állomásokat használ a GNSS-hibák mérésére, de az állomások szét vannak szórva az egész kontinenseken. A mért hibákat egy központi helyen dolgozzák fel, ahol a korrekciókat kiszámítják és továbbítják az adott területet lefedő geoszinkron műholdaknak. A korrekciós adatokat a műholdak az eredeti GNSS-adatokat átfedve (overlay) vagy azokat kiegészítve sugározzák.
A GNSS pontossága a műholdas mérések és a kapcsolódó korrekciók elérhetőségétől és pontosságától függ. A nagy teljesítményű GNSS-vevőkészülékek több frekvencián követik a GNSS-jeleket, és több GNSS-konstellációt és különböző korrekciós módszereket használnak a szükséges pontosság és hibatűrés biztosítása érdekében. Az így létrejövő redundancia stabil működést tesz lehetővé még akkor is, ha a műholdas mérések és adatok egy része interferenciának van kitéve. A tervezők többféle GNSS pontosság és redundancia közül választhatnak (3. ábra).
 3. ábra: GNSS pontossági fokozatok a megfelelő korrekciós módszerekkel és kiválasztott alkalmazásokkal. (Kép: Septentrio)
3. ábra: GNSS pontossági fokozatok a megfelelő korrekciós módszerekkel és kiválasztott alkalmazásokkal. (Kép: Septentrio)
Integrált vagy külső antennás GNSS modulok
A több konstellációs pozícionálás összetettsége miatt több beszállítótól is kaphatók olyan modulok, amelyek segítenek felgyorsítani a piacra kerülést, csökkenteni a költségeket és biztosítani a megfelelő működést. Ennek ellenére a tervezőknek meg kell fontolniuk, hogy belső antennát használjanak-e, vagy inkább GNSS-modulon kívüli antennát válasszanak. Az olyan alkalmazások esetében, ahol a piacra kerülési idő és a költségek prioritást élveznek, az integrált antenna előnyösebb lehet, mivel lényegesen kevesebb mérnöki munkát igényel. Azoknál az alkalmazásoknál, amelyeknél FCC- vagy CE-tanúsításra van szükség a beépített antennával ellátott modulok használata szintén felgyorsíthatja a jóváhagyási folyamatot. A végtermék mérete azonban megnőhet, és az integrált antennás megoldások rugalmassága korlátozott lehet.
A külső antennák szélesebb lehetőségeket biztosítanak a tervezők számára a működésbeli teljesítmény és az elrendezési lehetőségek tekintetében. A tervező dönthet egy nagy teljesítményű nagyméretű antenna vagy egy kisebb méretű és kisebb teljesítményű antenna mellett. Ezenkívül az antenna elhelyezése nem függ annyira attól, hogy a GNSS-modul hol található, ami tovább növeli a tervezési rugalmasságot. Ennek az elhelyezési rugalmasságnak köszönhetően a külső antennák megbízhatóbb GNSS-működést is biztosítanak. Az antennák elhelyezése és a csatlakozási útvonal létrehozása azonban összetett és időigényes folyamat lehet, továbbá speciális szakértelmet igényel, ami növelheti a költségeket és lassíthatja a piacra kerülés idejét.
Apró GNSS modul helyszűkös kialakításokhoz
Azok a tervezőcsapatok, amelyek rendelkeznek az antennák elhelyezéséhez és az útvonalak megválasztásához szükséges szakértelemmel használhatják az STMicroelectronics Teseo-LIV3F termékét, amely egy külső antennával rendelkező, több konstellációs (GPS/Galileo/GLONASS/BeiDou/QZSS) GNSS-modul (4. ábra). A modult 9,7 mm x 10,1 mm méretű LCC-18 tokozásban forgalmazzák, 1,5 méteres körkörös hibavalószínűségű (circular error probable, CEP) pozíciópontossággal rendelkezik, valamint a helyzetazonosítási idő (time to first fix, TTFF) hideg- és melegindításkor 32 s, illetve 1,5 s alatti (GPS, GLONASS). Energiafogyasztása készenléti állapotban 17 µW, míg folyamatos navigáció közben 75 mW.
 4. ábra: A Teseo-LIV3F GNSS modul tartalmazza a GNSS magot és alrendszereket, valamint az összes szükséges csatlakoztathatósági és energiagazdálkodási képességet, egy 9,7 x 10,1 mm-es tokozásban. Működéséhez külső antennát kell biztosítani. (Kép: STMicroelectronics)
4. ábra: A Teseo-LIV3F GNSS modul tartalmazza a GNSS magot és alrendszereket, valamint az összes szükséges csatlakoztathatósági és energiagazdálkodási képességet, egy 9,7 x 10,1 mm-es tokozásban. Működéséhez külső antennát kell biztosítani. (Kép: STMicroelectronics)
A Teseo-LIV3F beépített 26 MHz-es hőkompenzált kristályoszcillátora (TCXO) segít a nagy pontosság biztosításában, a 32 kHz-es valós idejű óra (RTC) pedig lehetővé teszi a helyzetazonosítási idő (TTFF) csökkentését. A 16 Mbit-es beágyazott flashmemória olyan funkciókat tesz lehetővé, mint az adatnaplózás, a hétnapos autonóm támogatott GNSS, valamint a firmware (FW) újrakonfigurálhatósága és frissíthetősége.
A Teseo-LIV3F számára alkalmas alkalmazások közé tartoznak a biztosítás, a logisztika, a drónok, az útdíjszedés, a lopásgátló rendszerek, az emberek és háziállatok helymeghatározása, a járműkövetés és a segélyhívások.
Mivel már rendelkezik a megfelelő tanúsítványokkal, a Teseo-LIV3F modul használata csökkentheti a végső alkalmazás piacra kerülésének idejét. Üzemi hőmérséklettartománya -40°C és +85°C között van.
A modullal való kísérletezéshez és az alkalmazásfejlesztés felgyorsításához a tervezők az AEK-COM-GNSST31 fejlesztői kártyát használhatják. Az X-CUBE-GNSS1 firmware-rel együtt használva a fejlesztői csomag külső memória nélkül is képes támogatni az adatgyűjtési, követési, navigációs és adatküldési funkciókat. Ezt a fejlesztői kártyát továbbá az SPC5 mikrokontrollerrel való használatra is tervezték, autóipari alkalmazások fejlesztéséhez.
GNSS modul interferenciacsökkentéssel
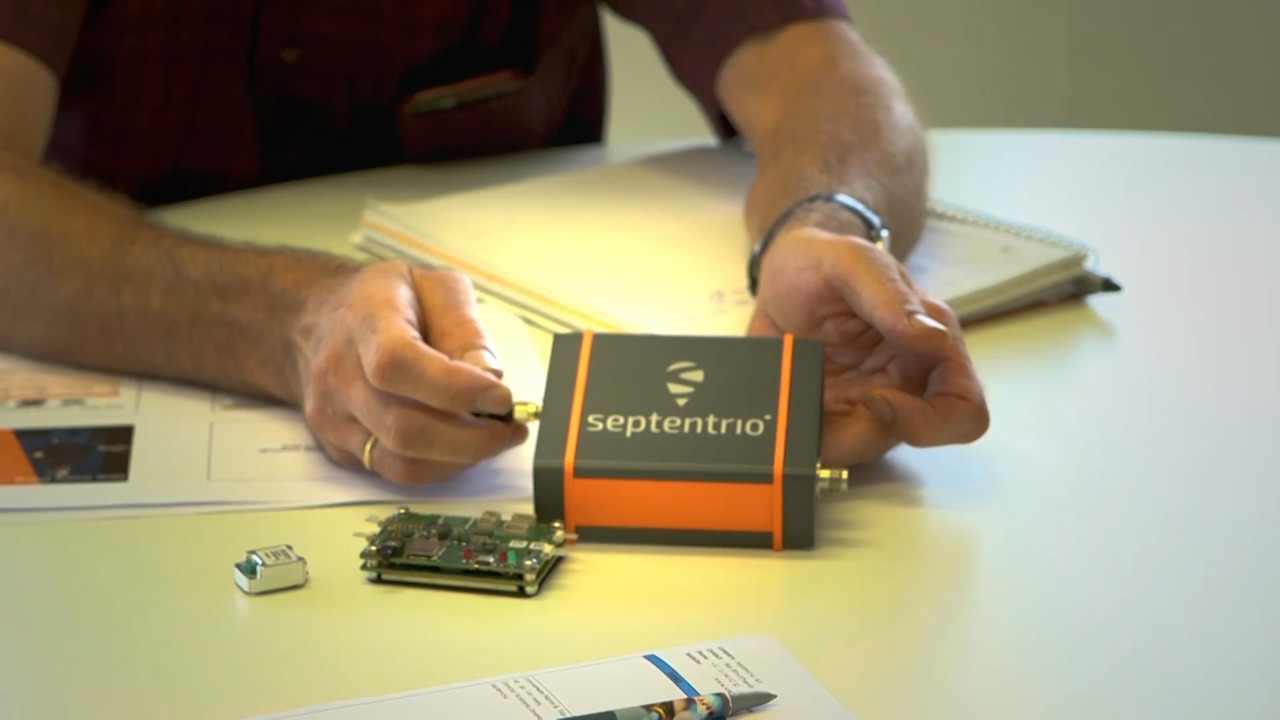
A Septentrio 410322 mosaic-X5 többkonstellációs GNSS-vevője egy 31 mm x 31 mm x 4 mm méretű, alacsony fogyasztású, felületszerelt modul, amely számos interfészt kínál a tervezőknek, többek között négy UART-ot, Ethernetet, USB-t, SDIO-t és két felhasználó által programozható GPIO-t.
A robotikában, autonóm rendszerekben és más tömegpiaci alkalmazásokban való használatra tervezett mosaic-X5 100 Hz frissítési sebességgel, 10 ms alatti késleltetéssel, valamint 0,6 cm-es függőleges és 1 cm-es vízszintes RTK pozicionálási pontossággal rendelkezik. Képes az összes GNSS-konstelláció követésére, támogatja a jelenlegi és jövőbeli jeleket, és kompatibilis a PPP, SSR, RTK és SBAS korrekciókkal. A modul TTFF-je 45 s alatti hidegindításkor és 20 s alatti melegindításkor.
A mosaic-X5 számos szabadalmaztatott Septentrio technológiát tartalmaz, köztük az AIM+-t, ami egy kártyára integrált interferencia-csökkentő technológia, amely elnyomja a különböző zavaró jeleket, az egyszerű, folyamatos, keskeny sávú jelektől az összetett, széles sávú és impulzus típusú zavaró jelekig.
A modulok interfészei, parancsai és adatüzenetei teljes mértékben dokumentáltak. A mellékelt RxTools szoftver lehetővé teszi a vevő konfigurálását és felügyeletét, valamint az adatok naplózását és elemzését.
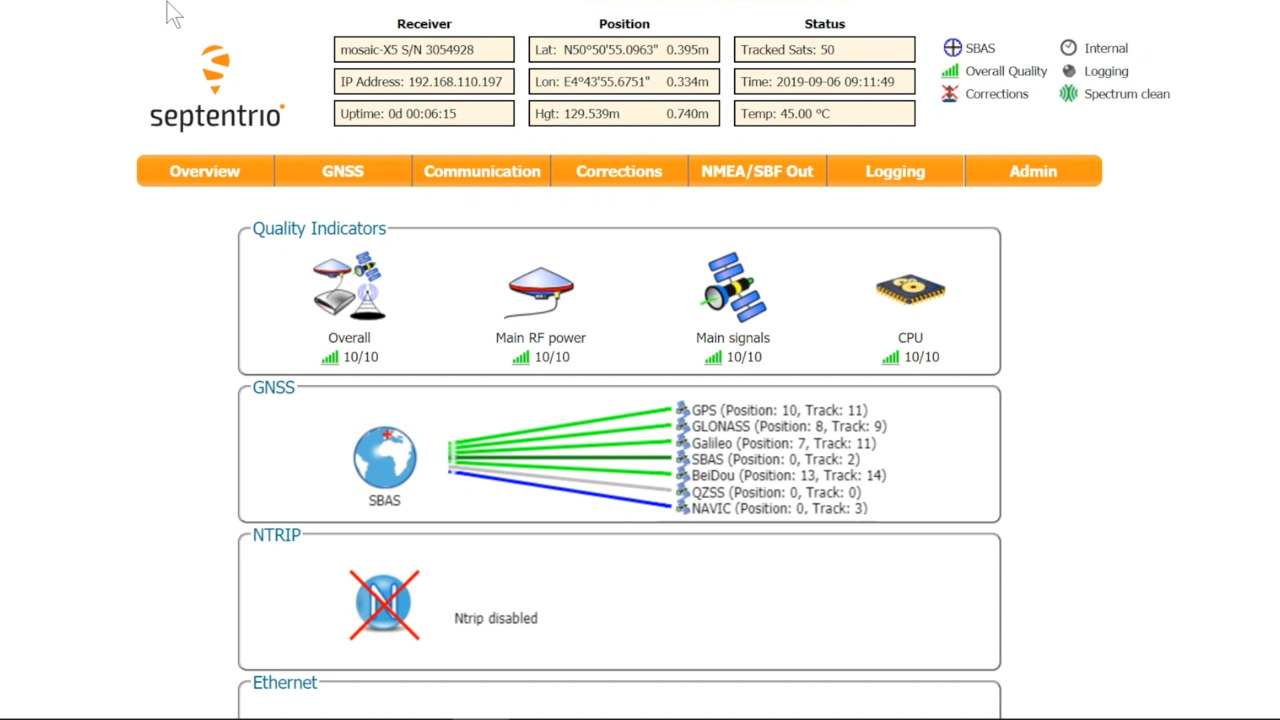
A Septentrio 410331P3161 mosaic-X5 fejlesztőkészlete lehetővé teszi a tervezők számára, hogy olyan prototípusokat vizsgáljanak, értékeljenek és fejlesszenek, amelyek a mosaic-X5 képességeit teljes mértékben kihasználják (5. ábra).
 5. ábra: A tervezők a 410331P3161 mosaic-X5 fejlesztőkészlet segítségével prototípusokat készíthetnek különböző csatlakozók, például Ethernet, COM portok vagy USB 2.0, illetve SD memóriakártya használatával. (Kép: Septentrio)
5. ábra: A tervezők a 410331P3161 mosaic-X5 fejlesztőkészlet segítségével prototípusokat készíthetnek különböző csatlakozók, például Ethernet, COM portok vagy USB 2.0, illetve SD memóriakártya használatával. (Kép: Septentrio)
A készlet a mosaic-X5 intuitív webes felhasználói felületét használja az egyszerű működéshez és felügyelethez, lehetővé téve a tervezők számára, hogy a vevőmodult bármilyen mobileszközről vagy számítógépről vezéreljék. A webes felületről a vevő működése könnyen leolvasható minőségi mutatókkal felügyelhető.
A tervezők a mosaic fejlesztőkészletnek az Ethernet, a COM portok, az USB 2.0 vagy az SD memóriakártya interfészek bármelyikének használatával prototípusokat készíthetnek.
Beépített antennával rendelkező GNSS modul
Az olyan alkalmazások tervezői számára, ahol előnyös lehet egy integrált antennával rendelkező GNSS-modul használata, a Würth Elektronik a 2614011037000 jelű Erinome-I modult kínálja, egy nagy teljesítményű System-on-Chip (SoC) rendszerrel (6. ábra). A modul a GPS, GLONASS, Galileo és BeiDou GNSS-konstellációkat támogatja, és a tetején egy integrált antenna található, amely leegyszerűsíti a hardverintegrációt és lerövidíti a piacra kerülési időt. Az antennával együtt a modul 18 mm x 18 mm méretű.
 6. ábra: A 2614011037000 Erinome-I egy komplett GNSS-modul, amely egy nagy teljesítményű GNSS SoC-t és egy integrált antennát tartalmaz. (Kép: Würth Elektronik)
6. ábra: A 2614011037000 Erinome-I egy komplett GNSS-modul, amely egy nagy teljesítményű GNSS SoC-t és egy integrált antennát tartalmaz. (Kép: Würth Elektronik)
A modul tartalmazza továbbá a TCXO-t, az RF-szűrőt, a kis zajú erősítőt (LNA) és a soros flashmemóriát.
A Würth a 2614019037001 jelű fejlesztői kártyát (EVB) is kínálja az Erinome-I-hez (7. ábra). A fejlesztői kártya referenciatervként is szolgálhat, amelynek felhasználásával a GNSS-modul alkalmazásokba integrálható. Az EVB egy USB-porton keresztül csatlakoztatható a számítógéphez. Egy többérintkezős csatlakozó teszi lehetővé a tervezők számára a GNSS-modul összes tűjéhez való hozzáférést.
 7. ábra: Az Erinome-I-hez készített 2614019037001 jelölésű fejlesztői kártya, amely referenciatervként is használható (az Erinome-I a panel közepéhez közel található, a modul közepén integrált antennával). (Kép: Würth Elektronik)
7. ábra: Az Erinome-I-hez készített 2614019037001 jelölésű fejlesztői kártya, amely referenciatervként is használható (az Erinome-I a panel közepéhez közel található, a modul közepén integrált antennával). (Kép: Würth Elektronik)
A Würth Elektronik Navigation and Satellite Software (WENSS) szoftvere egy egyszerű PC-s felület, amely az UART-interfészen keresztül tud interakcióba lépni az Erinome-I GNSS-modullal. Támogatja:
- a fejlesztői kártya működésének vezérlését;
- a kétirányú kommunikációt az Erinome-I modullal;
- az Erinome-I jellemzőinek és képességeinek kiértékelését;
- az Erinome-I protokollok, mondatok és parancsok megismerését;
- az Erinome-I konfigurálását a protokollok ismerete nélkül;
- az Erinome-I által használt mondatok és parancsok elemzését.
A WENSS segítségével a pozicionáló alkalmazások egyszerűen kiértékelhetők haladó szintű tudás nélkül is. A tapasztalt fejlesztők a WENSS-t a fejlettebb konfigurációkhoz is használhatják.
Összegzés
A pontos és megbízható helymeghatározási képesség a legjobban több műholdas rendszer használatával érhető el, a kapcsolódó korrekciós technológia támogatásával. Ezek összetett rendszerek, de a tervezők a lehetőségek gyors és hatékony összehasonlításához valamint a pozícióalapú funkciók és szolgáltatások megvalósításához az előre elkészített GNSS-modulokhoz valamint a kapcsolódó fejlesztői készletekhez és környezetekhez fordulhatnak.
Ajánlott olvasnivaló
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.