Az együttműködő robotok biztonságának értékelése során figyelembe veendő fontos szempontok
Contributed By DigiKey's North American Editors
2024-04-03
Az együttműködő (esetenként a magyarban is használt idegen szóval kollaboratív) robotokat úgy tervezték, hogy az emberekkel együtt dolgozzanak, és segítsék a rugalmas termelést az Ipar 4.0-s gyárakban. A hagyományos ipari robotokhoz képest az együttműködő robotok (melyeket gyakran emlegetnek röviden az angol collaborative robot kifejezésből alkotott mozaikszóval cobot vagy magyaros írásmóddal kobot néven) egyszerűbbek, könnyebben beállíthatóak, és nem igényelnek biztonságosan elkülönített munkaterületeket. Mivel a kobotokat úgy tervezték, hogy emberekkel együtt dolgozzanak, máshogyan épülnek fel, mint a többi ipari robot, és olyan funkciókkal vannak ellátva, mint az ütközésérzékelő rendszerek, az erő-visszacsatolás, a rugalmas működtetőelemek és a kis tehetetlenségű szervomotorok.
Mivel ezek a robotok felépítésüknél fogva különböznek a többitől, a kobotokra különleges biztonsági szabványokat dolgoztak ki. A Nemzetközi Szabványügyi Szervezet ISO/TS 15066 jelű műszaki előírása (International Organization for Standardization Technical Specification 15066) meghatározza az ipari kobotok és munkakörnyezetük biztonsági követelményeit. Kiegészíti az ISO 10218-1 és az ISO 10218-2 szabványban szereplő, a kobotok működésére vonatkozó követelményeket és útmutatásokat.
Ez a cikk röviden áttekinti az ISO/TS 15066 követelményeit és azt, hogy hogyan illeszkednek azok az ISO 10218-1 és ISO 10218-2 szabványhoz. Ezután áttekinti az együttműködés összetettségét, beleértve az együttműködési munkaterület fogalmának meghatározását is. Megvizsgálja a robotok biztonságával kapcsolatos tényezőket, például a kobotokba épített biztonsági funkciókat és azt, hogy milyen külső biztonsági funkciókra van szükség, valamint példaként bemutat olyan eszközöket, mint a közelségérzékelők, a fényfüggönyök és a biztonsági szőnyegek. A cikk a kobotok biztonsági szempontjaival kapcsolatos néhány terület rövid áttekintésével zárul.
Az ipari robotokra és a kobotokra számos lényeges biztonsági szabvány vonatkozik. Az ISO/TS 15066 az ipari kobotrendszerekre és a munkakörnyezetre vonatkozó biztonsági követelményeket részletezi, és alapvetően a korábbi szabványok, például az ISO 10218 sorozat korlátozott követelményeire épít, illetve kiegészíti azokat. Az ISO 10218-1 szabvány az általános robotokra és robotikai eszközökre, míg az ISO 10218-2 a robotrendszerekre és a munkakörnyezetbe való beillesztésükre összpontosít. Az ANSI/RIA R15.06 szabvány az ISO 10218-1 és az ISO 10218-2 szabvány amerikai, az American National Standards Institute/Robotics Industry Association (Amerikai Nemzeti Szabványügyi Intézet/Robotokkal Segített Iparágak Szövetsége) által átvett és átdolgozott változata.
Az együttműködés bonyolultsága
Mielőtt belemennénk a kobotok biztonságának részleteibe, érdemes meghatározni, mi is az az együttműködés. Az együttműködés a robotikában összetett tevékenység, és három tényezőt foglal magában:
- A kobot az ANSI/RIA R15.06 szerint „az emberrel egy meghatározott együttműködési munkaterületen belül való közvetlen együttműködésre tervezett robot”.
- Az ISO/TS 15066 szerint az együttműködés „olyan állapot, amelyben egy kifejezetten erre tervezett robotrendszer és egy kezelő egy együttműködési munkaterületen belül együtt dolgozik”.
- Végül az ANSI/RIA R15.06 szerint az együttműködési munkaterület az a „védett térrészen belüli munkaterület, ahol a robot és az ember egyidejűleg képes feladatokat végezni a gyártási tevékenység során”.
Ez a meghatározás egy „védett térrészen belüli” területre szűkíti le az együttműködési munkaterületet. A védett térrész a kobotokba beépített szabványos biztonsági funkciók mellett még egy további biztonsági védelmi réteget tartalmaz.
A kobotokba beépített általános védelmi funkciók közé tartoznak a nyomatékmérésen alapuló érintésérzékelő rendszerek minden egyes csuklónál. Ezek figyelik a váratlan ütközéseket, akadályokat, illetve a túlságosan nagy erőket és nyomatékokat. Lenniük kell a rendszerben automatikus fékrendszereknek és kézi fékkioldóknak is, hogy áramellátás nélkül is mozgatni lehessen a kart.
A kobot emberrel való nem várt érintkezésére különösen oda kell figyelni. A szabványok előírják, hogy az emberi fej bármely részével való érintkezést meg kell előzni. Ezen túlmenően a szabvány a testet 29 különböző területre osztja, és kétféle érintkezéstípusra vonatkozó korlátozásokat részletez:
- Az átmeneti érintkezés olyan mozgás közbeni dinamikus esemény, amikor a kobot emberhez ér. A korlátozások a helyzeten, a tehetetlenségen és a relatív sebességen alapulnak.
- Kvázistatikus érintkezés akkor következik be, amikor egy testrész beszorul a kobot és egy felület közé. A korlátozások a préselő- és szorítóhatásokhoz kapcsolódó nyomáson és erőn alapulnak.
Az előírás a használati szempontokra épülő iránymutatást ad, nem pedig abszolút határértékeket határoz meg. Azt is kijelenti, hogy az iránymutatás tájékoztató jellegű, és a jelenlegi bevált megoldásokat tükrözi, mivel az emberek és robotok közötti együttműködés új terület, és a kutatások még folyamatban vannak.
Az együttműködés folyamatossága
Nincs egyetlen együttműködési terület. Az emberek és a robotok sokféle módon léphetnek kapcsolatba egymással és működhetnek együtt. Az együttműködési területek a közös egy helyen tartózkodástól kezdve, amikor az áram alatt lévő robot megáll, amikor ember lép be az együttműködési munkaterületre, egészen a teljes együttműködési tevékenységekig terjednek, amikor az ember megérinti a munkát végző kobotot (1. ábra).
 1. ábra: Az ember és a robot lehetséges együttműködési szintjeinek skálája meglehetősen széles a közös egy helyen tartózkodástól (co-existing) a közös munkavégzésen (co-operative) át a teljes együttműködésig (fully interactive) (ábra: SICK)
1. ábra: Az ember és a robot lehetséges együttműködési szintjeinek skálája meglehetősen széles a közös egy helyen tartózkodástól (co-existing) a közös munkavégzésen (co-operative) át a teljes együttműködésig (fully interactive) (ábra: SICK)
Az egyes együttműködési területek biztonsági igényeinek meghatározásához kockázatfelmérésre van szükség. Ez magában foglalja a felhasználási területtel kapcsolatos veszélyek és kockázatok azonosítását, kiértékelését és csökkentését. Az ISO 10218 szabványban található egy lista a különböző körülmények között elvárható biztonsági jellemzőkről, de a szabvány nem ad meg egyértelmű követelményeket. Az ISO/TS 15066 további részleteket tartalmaz a kobotokkal kapcsolatos kockázatfelméréshez. A kockázatfelmérés célja minden esetben az együttműködési területek biztonságos kialakításához szükséges külső biztonsági eszközök és rendszerek meghatározása.
A robotok és a kockázatfelmérés alaposabb megismeréséhez lásd a Safely and Efficiently Integrating AMRs into Industry 4.0 Operations for Maximum Benefit (Az önjáró robotok biztonságos és hatékony beillesztése az Ipar 4.0-s tevékenységekbe a minél nagyobb előnyök elérése érdekében) című cikket.
Védelem és hatékonyság
Bár a kobotokat biztonságos működésre tervezték, további védelmi rétegekkel javítható az együttműködési területek hatékonysága. Amikor ember tartózkodik az együttműködési munkaterületen, az ISO/TS 15066 szabvány további biztonsági intézkedések nélkül tengelyenként legfeljebb 0,25 m/s-re korlátozza a legnagyobb sebességet. A legtöbb kobot esetében ez nagyon lassú.
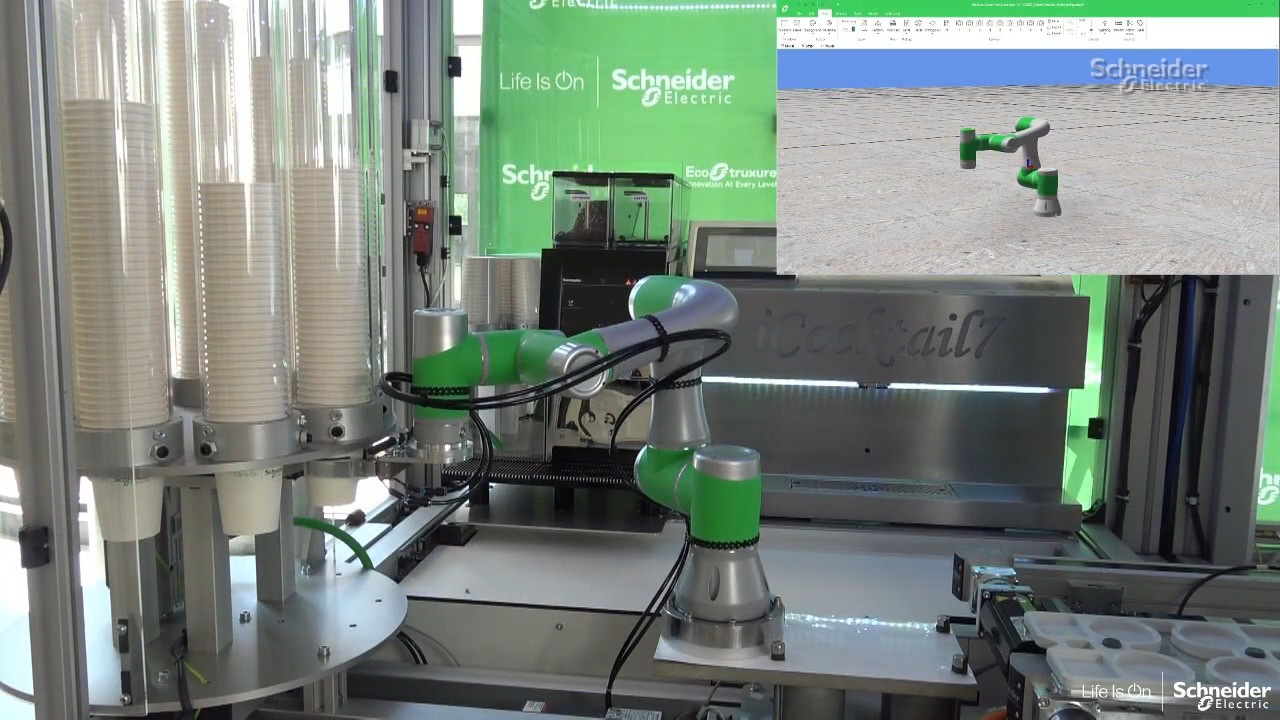
A Schneider Electric LXMRL12S0000 Lexium kobotjának például 12 kg a legnagyobb hasznos teherbírása, működési sugara (munkavégzési tartománya) 1327 mm, helyzetbeállítási pontossága ±0,03 mm, és szerszámvégének legnagyobb sebessége 3 m/s, ami 12-szer gyorsabb, mint az ISO/TS 15066 által abban az esetben megengedett legnagyobb sebesség, amikor ember tartózkodik az együttműködési munkaterületen (2. ábra).
 2. ábra: Ez a kobot 12-szer gyorsabban mozog, mint az ISO/TS 15066 szabvány által abban az esetben megengedett legnagyobb sebesség, amikor ember tartózkodik az együttműködési munkaterületen (kép: Schneider Electric)
2. ábra: Ez a kobot 12-szer gyorsabban mozog, mint az ISO/TS 15066 szabvány által abban az esetben megengedett legnagyobb sebesség, amikor ember tartózkodik az együttműködési munkaterületen (kép: Schneider Electric)
A kobotok számos felhasználási területen hosszú ideig képesek önmagukban működni. Így az emberek együttműködési munkaterületen való jelenlétének vagy jelen nem létének érzékelése lehetővé teszi, hogy a kobot sokkal gyorsabban és nagyobb hatékonysággal működjön, amikor nincs ember a közelében. Az emberek jelenlétét érzékelő gyakori eszközök közé tartoznak a biztonsági letapogatók (idegen szóval szkennerek), a fényfüggönyök és a biztonsági szőnyegek. Mindegyik technika más-más előnyöket kínál, és gyakran kombinálva használják őket.
Biztonsági letapogatók
A biztonsági letapogatók egy kijelölt területet figyelnek, hogy érzékeljék ott az emberek jelenlétét. Meg tudják határozni, hogy egy ember milyen messze van, és az aktív biztonsági zónán kívül különböző figyelmeztető zónákat is ki lehet velük alakítani.
Az Omron OS32C-SP1-4M jelű eszköze jó példa a kobotokkal való használatra tervezett biztonsági lézerletapogatókra. Biztonsági sugara maximum 4 m, és több figyelmeztető zónát is ki lehet vele alakítani, akár 15 m-es magasságig. 70 szokványos biztonsági és figyelmeztetőzóna-kombináció található benne a bonyolult formájú együttműködési munkaterületek kialakításának elősegítésére. Ezenkívül a legkisebb objektumfelbontás 30, 40, 50 vagy 70 mm-re állítható, a válaszidő pedig 80 ezredmásodperctől (ms) 680 ms-ig terjedhet, ami tovább növeli a használati rugalmasságot (3. ábra).
 3. ábra: Ennek a biztonsági letapogatónak maximum 4 m a biztonsági sugara, és több figyelmeztető zónát is ki lehet vele alakítani akár 15 m-es magasságig (kép: DigiKey)
3. ábra: Ennek a biztonsági letapogatónak maximum 4 m a biztonsági sugara, és több figyelmeztető zónát is ki lehet vele alakítani akár 15 m-es magasságig (kép: DigiKey)
Fényfüggönyök
A fényfüggönyök képesek érzékelni az emberek jelenlétét, és kialakíthatóak úgy, hogy különböző méretű objektumokat, például ujjakat vagy kezeket is érzékeljenek. A biztonsági letapogatókkal ellentétben a fényfüggönyök távolságot nem mérnek. Fénysugarak sorozatát küldik a lineáris fénykibocsátó tömbről a vevőtömbre, és érzékelik, ha valamilyen objektum megszakít egy vagy több fénysugarat.
A biztonsági besorolások tekintetében két fő fényfüggönytípust használnak: ezek a 2. típusú és a 4. típusú. Külső megjelenésük hasonló, de úgy tervezték őket, hogy különböző szintű biztonságot nyújtsanak. A 4. típusú fényfüggöny az együttműködési munkaterületet alkotó védett térrészt felügyeli. A 2. típusú fényfüggönyöket alacsonyabb kockázatú felhasználási területekhez tervezték.
A fényfüggönyök a munkaterület kerülete mentén vannak elhelyezve, és többféle felbontással kaphatóak, például 14 mm-essel az ujjérzékeléshez és 24 mm-essel a kézérzékeléshez. A Banner Engineering SLC4P24-160P44 típusú eszköze egy 4. típusú fényfüggönykészlet, amely egy fénykibocsátó és egy vevőtömbből áll, és 24 mm-es felbontása van az emberek és a gépek, például a kobotok védelmére (4. ábra). A fénykibocsátó tömbökben egy sor szinkronizált, modulált infravörös fényt kibocsátó világítódióda található. A vevőtömb egy sor ennek megfelelő szinkronizált fényérzékelővel van ellátva. A fénykibocsátó tömbök hatótávolsága 2 m, és ezek a fényfüggönyök 160 és 320 mm közötti, 80 mm-es lépésekben növekvő hosszúságban kaphatóak.
 4. ábra: Ez a 4. típusú fényfüggöny 24 mm-es felbontású (kép: Banner Engineering)
4. ábra: Ez a 4. típusú fényfüggöny 24 mm-es felbontású (kép: Banner Engineering)
A biztonsági lézerletapogatók és a fényfüggönyök az együttműködési munkaterületek biztonságát növelő érintésmentes eszközök. Nehéz lehet viszont optikailag kihívást jelentő környezetben használni őket, például olyan területeken, ahol a fényt erősen visszaverő felületek nem kívánt fényinterferenciát okozhatnak, vagy a szivárgó olaj vagy zsír, illetve a túl sok por vagy túl nagy páratartalom miatt a fénysugarak elakadhatnak.
Ezen optikai érzékelők némelyike érzékenységi beállításokkal is el van látva, amelyek segítségével bizonyos típusú zavarásokat mérsékelni lehet. Ezek az érzékenységi beállítások növelhetik a válaszidőt, és más teljesítménybeli megalkuvásokat is szükségessé tehetnek. Egy másik megoldás a biztonsági szőnyegek és az optikai érzékelők együttes használata.
Biztonsági szőnyegek
A biztonsági szőnyegeket két vezetőlemez alkotja, amelyeket egy lyukakkal ellátott szigetelőréteg választ el egymástól, és használhatók önmagukban vagy más típusú érzékelőkkel kombinálva is. Ha valaki rálép a szőnyegre, a felső vezetőlemez lenyomódik, és érintkezik az alsó lemezzel, ami riasztási jelzést vált ki (5. ábra). A szőnyegek külseje poliuretán anyagból van, amely csúszásmentes, és víz-, szennyeződés- és olajálló. Az ASO Safety Solutions cég 1602-5533 jelű SENTIR szőnyegtípusát használva akár 10 szőnyeget is sorba lehet kapcsolni egyetlen figyelőegységhez, így a maximális lefedettség akár 10 m2 is lehet.
 5. ábra: Ha rálépünk, a biztonsági szőnyeg felső és alsó vezetőrétege érintkezik egymással, és ez riasztási jelzést vált ki (ábra: ASO Safety Solutions)
5. ábra: Ha rálépünk, a biztonsági szőnyeg felső és alsó vezetőrétege érintkezik egymással, és ez riasztási jelzést vált ki (ábra: ASO Safety Solutions)
A biztonság a részletekben rejlik
Nincs egyetlen olyan megoldás, amely garantálja a teljes biztonságot. Minden együttműködési terület más és más, és az egyedi jellemzői és igényei alapján kell kezelni. Kulcsfontosságú tényező: hol helyezkedik el a felhasználási terület az együttműködés spektrumában? (Lásd: 1. ábra.) Minél szorosabb a kobot és az emberek közötti együttműködés, annál nagyobb szükség van a védelemre.
Több szempontot is figyelembe kell venni. Néhány ezek közül:
- Minden egyes helyszínen részletes kockázatfelmérést kell végezni annak megállapítására, hogy a kobotot nem egy másik munkaállomásról helyezték-e át. Még ha azonosnak tűnnek is, a kis eltérések a biztonság szempontjából nagy különbséget jelenthetnek.
- Ha más gépek is vannak az együttműködési munkaterületen, rá kell-e kapcsolni azokat a leállítórendszerre vagy a kobot biztonsági lassítórendszerére?
- Ez a cikk a biztonsággal kapcsolatos hardverre összpontosít, de az egyre elterjedtebbé váló hálózatba kapcsolt rendszerek esetében a kiberbiztonság is fontos szempont a kobotműködés zavarásának vagy a biztonsági rendszerekbe való beavatkozásnak a megelőzése érdekében.
Összegzés
A kobotok biztonságának megoldása összetett feladat. Ez a védett térrészen belüli együttműködési munkaterület meghatározásával kezdődik, és megköveteli az együttműködési művelet kockázatfelmérését. Fontosak az olyan szabványok, mint az ISO/TS 15066 és az ISO 10218 sorozat, amelyek ajánlásokat és iránymutatásokat adnak. A robotok olyan alapvető biztonsági funkciókkal is el vannak látva, mint az ütközésérzékelő rendszerek, az erő-visszacsatolás, a rugalmas működtetőelemek és a kis tehetetlenségű szervomotorok. Az együttműködési terület sajátosságaitól függően további biztonsági eszközökre, például közelségérzékelőkre, fényfüggönyökre és biztonsági szőnyegekre is szükség lehet.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.