Az ipari metaverzum kis- és közepes vállalkozások általi használatának lehetőségei robotikai megoldások gyors feltárására és bevezetésére
Contributed By DigiKey's North American Editors
2024-11-21
A robotok és az együttműködő robotok (amelyeket gyakran emlegetnek röviden az angol collaborative robot kifejezésből alkotott mozaikszóval cobot vagy magyaros írásmóddal kobot néven) a gyárautomatizálási technikák élvonalába tartoznak. A digitális iker és a virtuális valóság (VR, virtual reality) pedig a tervező- és fejlesztőeszközök élvonalát képviseli. Ezeket közösen használva egy olyan ipari metaverzum hozható létre, amely gyorsabban tesz lehetővé nagyobb termelékenységet még a kis- és közepes vállalkozások (kkv) számára is.
A kis- és közepes vállalkozások tervezői számára előnyös lehet egy egyszerű és logikusan használható felület, amely egy digitális ikret, egy fizikai objektum, például egy delta-, lineáris (pályájú) vagy többtengelyű robot rendkívül részletes virtuális modelljét és egy 3 dimenziós (3D) virtuális valóságbeli környezetet kombinál ahhoz, hogy lehetővé tegye a robot mozgássorrendjeinek közvetlen végrehajtását és ellenőrzését.
Ezeknek a funkcióknak a használata segíti az automatizálási rendszer fizikai hardver nélküli finomhangolását és optimalizálását, és lehetővé teszi többféle megoldási lehetőség gyors feltárását.
Ez a cikk először is áttekinti a matematikai, adatokkal leírt digitális iker és a virtuális valóságbeli vagy vizuális (azaz képi megjelenítésű) digitális iker (VR-iker) közötti különbséget, valamint azt, hogy melyikre hogyan van szükség az ipari metaverzum létrehozásához. Ezt követően bemutatja az Igus robotvezérlő rendszerét és az ahhoz kapcsolódó szoftvereket, amelyekkel a fizikai hardver használata nélkül, egy 3D felületen lehet szimulálni a robotokat (virtuális valóságbeli digitális iker), valamint azokat a kompatibilis delta-, lineáris és többtengelyű robotokat, amelyekkel az optimalizált megoldás megvalósítható.
A digitális iker és a virtuális valóság egymást kiegészítő technikák, amelyek különböző képi megjelenítési formákat, együttműködési lehetőségeket és hardvereket használnak. A digitális iker egy fizikai objektum, rendszer vagy folyamat adatalapú modellje. Úgy van megtervezve, hogy a modellezett elem teljes életciklusa során használni lehessen, a tervezés kezdetétől a leszerelésig és újrahasznosításig.
A virtuális valóság egy magával ragadó képi megjelenítéses technika, amely digitális modelleket is használ. A virtuális valóságbeli környezetben lehetőség van az objektumok közötti kapcsolatok és kölcsönhatások szimulálására, ami lehet például egy feladatokat végrehajtó robot. Tehát, bár mindkét technika használható tervezésre és szimulációra, a digitális iker technika a teljes életciklusra, a virtuális valóság pedig a fizikai tárgyak közötti kölcsönhatásokra összpontosít.
A metaverzum a digitális ikret és a virtuális valóságot kombinálja egy célirányos virtuális környezetben, amely lehetőséget ad a digitális objektumok és az emberek közötti valós idejű együttműködésre. Bár a metaverzumot gyakran társítják a számítógépes játékokhoz, de egyre elterjedtebben használják az üzleti és ipari területeken is.
Üdvözöljük az iguverzumban!
Az Igus kifejlesztette saját metaverzumát, az iguverzumot, hogy támogassa a műszaki együttműködést ipari környezetben, például robotrendszerek fejlesztése és telepítése során. Az iguverzum az Igus Robot Control (iRC) robotvezérlő szoftveren keresztül valósítható meg. Ez az ingyenes és licencet nem igénylő alkalmazás lehetővé teszi a felhasználók számára a különböző típusú robotok, köztük deltarobotok, kobotok (robotkarok) és portálrobotok vezérlését.
A felhasználók számára 3D felületet és több mint 100 mintaprogramot kínál. Az iRC használatához szükséges rendszerkövetelmények közé tartozik egy számítógép (legalább Intel i5 processzor) Windows 10 vagy Windows 11 (64 bites) operációs rendszerrel, 500 MB szabad lemezterülettel és vezeték nélküli vagy ethernetes hálózati kapcsolattal.
A szoftver lényege a programozandó robot 3D digitális ikre. Egy példa erre egy háromtengelyű lineáris portálrobot, mint az 500 mm × 500 mm × 100 mm munkaterületű DLE-RG-0001-AC-500-500-500-100 típus, vagy egy kéttengelyű, XY irányú robot, mint a 800 mm × 500 mm munkaterületű DLE-LG-0012-AC-800-500 típus (1. ábra). A tervezők néhány egérkattintással meghatározhatják a mozgásokat, és a 3D modell segítségével még a robot megvásárlása előtt megbizonyosodhatnak arról, hogy megvalósíthatók-e a kívánt mozgások.
 1. ábra: Példa egy háromtengelyű portálrobot virtuális valóságbeli 3D digitális ikrére az iguverzumban (ábra: Igus)
1. ábra: Példa egy háromtengelyű portálrobot virtuális valóságbeli 3D digitális ikrére az iguverzumban (ábra: Igus)
Az iRC szoftver mellett a robotvezérlő is az iguverzum fejlesztőkörnyezet kulcsfontosságú eleme. Az IRC-LG12-02000 típus például 48 V-os villanymotorokhoz készült, hét bemenettel és hét kimenettel, és 10 m-es kábellel csatlakoztatható a robothoz. Az iRC vezérlőegységek közé tartoznak a különböző méretű bipoláris léptetőmotorokhoz való villanymotor-vezérlő modulok is, amelyek beállítható és gyárilag beállított változatban is kaphatóak. Számos illesztőfelületük van a rendszerbe építéshez, többek között az alábbiak:
- PLC-illesztő (PLC: programmable logic controller. programozható logikai vezérlőegység) a digitális be- és kimeneteken keresztül történő vezérléshez, különösen a programok PLC-n keresztül vagy nyomógombbal történő egyszerű indításához és leállításához
- Modbus TCP illesztőfelület PLC-vel vagy számítógéppel történő vezérléshez
- CRI (Common Robotic Interface, közös robotillesztő felület) Ethernet a PLC-vel vagy számítógéppel történő történő vezérléshez és beállításhoz
- ROS (Robot Operating System, robotokhoz való operációs rendszer) illesztőfelület a robot ROS használatával történő működtetéséhez
- Illesztőfelület objektumérzékelő kamerákhoz
- Felhőillesztő a robot állapotának távfigyelésére
Támogatott mozgásrendszerek
Az iguverzum számos mozgásrendszert (alapmozgást) támogat, amelyek a robot irányított mozgását szabják meg. Az előre beállított mozgásrendszeren kívül az iRC-ben akár három további, kinematikailag egymástól független tengely is beállítható. Az előre beállított mozgásrendszer a következőket tartalmazza:
- 2 és 3 tengelyű deltarobotok
- portálrobotok:
- 2 tengelyű (X és Y tengely)
- 2 tengelyű (Y és Z tengely)
- 3 tengelyű (X, Y és Z tengely)
- robotkarok (kobotok):
- 3 tengelyű (1., 2. és 3. tengely)
- 3 tengelyű (2., 3. és 4. tengely)
- 4 tengelyű (1., 2., 3. és 4. tengely)
- 4 tengelyű (2., 3., 4. és 5. tengely)
- 5 tengelyű (1–5. tengely)
- 6 tengelyű (1–6. tengely)
- 4 tengelyű SCARA robot
Egyszerű programozás az alacsony költségű automatizáláshoz
Az Igus robotokat és az iRC-t úgy tervezték, hogy segítsék az alacsony költségű automatizálást. Ez lehetetlen lenne egy egyszerűen használható programozási felület nélkül. Az iguverzumban egy 3 gombos egér vagy egy játékkonzol segítségével mozgatható és állítható a kívánt helyzetbe a robot. Az iRC szoftverrel a felhasználó szabadon mozgathatja a digitális iker minden tengelyét a 3D felületen. A robotvezérlő szoftver fejlesztését egy betanítási funkció segíti, akár fizikai robot csatlakoztatása nélkül is.
A betanítás során a felhasználó kézzel állítja a virtuális robotot a kívánt helyzetbe, és meghatározza, hogy ott hogyan mozogjon. A folyamat mindaddig ismétlődik, amíg a teljes mozgásprofil létre nem jön. Az iRC szoftver szerszámközéppont funkciója lehetővé teszi a felhasználók számára, hogy egyszerűen adjanak a robothoz különféle végberendezéseket, például robotkezeket, és automatikusan állítsák be a szerszám középpontját a roboton. Ezen kívül magasabb szintű ipari vezérlőrendszerekkel való kapcsolat is létrehozható.
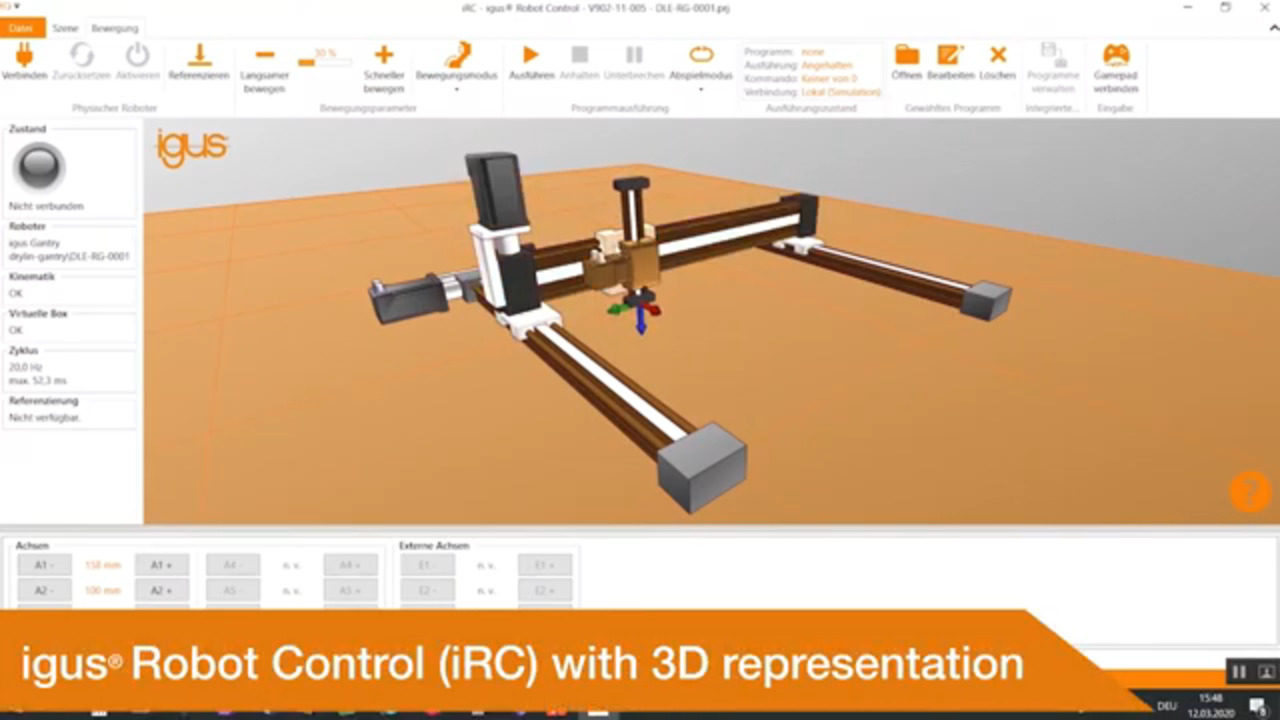
A folyamat a robot bekapcsolásával kezdődik, a kezelőfelület Connect (Csatlakozás), Reset (Visszaállítás) és Enable (Engedélyezés) gombjának szükség szerinti használatával. Az iRC állapotjelző (Status) LED-jének zölden kell világítania, és az állapotjelzőnek a No Error (Nincs hiba) jelzést kell mutatnia. A mozgásprofil ekkor a Jogging (Léptetés) lapon adható meg (2. ábra).
 in the iguverse immersive development environment (click to enlarge)") 2. ábra: A mozgásprofilok megadására az iguverzum jól átlátható fejlesztési környezetének Jogging (Léptetés) lapja (balra lent) használható (kép: Igus)
2. ábra: A mozgásprofilok megadására az iguverzum jól átlátható fejlesztési környezetének Jogging (Léptetés) lapja (balra lent) használható (kép: Igus)
Portálrobotok
Az iguverzum előzőekben látott példáihoz hasonlóan a portálrobotoknak két alap X tengelyük, egy Y tengelyük és esetlegesen egy Z tengelyük van. Az Y tengely a két párhuzamos X tengelyhez kapcsolódik, és kétdimenziós térben mozog előre-hátra. Az esetleges Z tengely a mozgás harmadik dimenziójának megvalósítását teszi lehetővé.
Az Igus portálrobotjai önkenő műanyag betétekkel vannak ellátva, amelyek simábban és csendesebben csúsznak és gördülnek, mint a hagyományos golyóscsapágyas konstrukciók. Az új kialakítás könnyebb, korrózióálló, és nem igényel karbantartást, ami fontos tulajdonság a kis- és közepes vállalkozások számára. A kis- és közepes vállalkozások számára az is lényeges, hogy ezek a robotok akár 40%-kal kevesebbe kerülnek, mint a hagyományos portálrobotok, így gyorsabb megtérülést tesznek lehetővé.
Ezek a robotok két felhasználási osztályba sorolhatók: kis sebesség nagy terheléssel vagy nagy sebesség kis terheléssel. A jellemző felhasználási területeik közé tartozik a csomagolás, a felszedés és elhelyezés, a címkézés, az anyagmozgatás és az összeszerelési műveletek.
Többféle méretben kaphatóak. A választható tartozékaik között megtalálhatók a csatlakozók, a végberendezések és a villanymotortartó karimák. Példák közepes méretű portálrobotokra:
- DLE-FG-0006-AC-650-650, egy 650 mm × 650 mm munkaterületű kétdimenziós, egy síkban működő portálrobot. Ez a robot maximum 8 kg hasznos terhet képes mozgatni, és dinamikusan akár percenként 20 felszedés végrehajtására is képes.
- DLE-RG-0012-AC-800-800-500, egy 500 mm × 650 mm munkaterületű háromdimenziós portálrobot. Maximum 10 kg hasznos teher mozgatására képes, akár percenként 20 felszedéses dinamikus sebességgel.
Raklapozási képességek
A gyártási és logisztikai területeken mindennapos tevékenység a termékek szállításra történő raklapozása. Az iguverzum legújabb és legnagyobb tagja az XXL méretű nagy portálrobot, amelynek munkaterülete 2000 mm × 2000 mm × 1500 mm, és amely10 kg-ig jól használható raklapozási feladatokra. Egyedi kivitelben akár 6000 mm × 6000 mm × 1500 mm-es munkaterülettel is kérhető.
Ezek a portálrobotok képesek akár 10 kg tömegű alkatrészeket is felszedni, maximum 500 mm/s sebességgel szállítani és 0,8 mm-es ismétlési pontossággal raklapra helyezni (3. ábra). Az Igus raklapozó robot akár 60%-kal kevesebbe kerül, mint a hasonló rendszerek.
 3. ábra: A gyártási és logisztikai műveletek során gyakori és fontos tevékenység a raklapozás, amely egy portálrobot segítségével automatizálható (kép: Igus)
3. ábra: A gyártási és logisztikai műveletek során gyakori és fontos tevékenység a raklapozás, amely egy portálrobot segítségével automatizálható (kép: Igus)
Deltarobotok
A portálrobotokhoz hasonlóan a deltarobotok is két vagy három tengelyű változatban kaphatóak. A deltarobotoknak a munkaterület fölé képzelt kupola alakú a munkaterületük. Rendkívül nagy sebességűek, és gyakran használják őket anyagmozgatásra és alkatrészek elhelyezésére. Néhány példa az Igus deltarobotjaira:
- RBTX-IGUS-0047 háromtengelyű robot, 660 mm munkaterület-átmérővel. Pontossága ±0,5 mm, legnagyobb hasznos terhelhetősége 5 kg, legnagyobb sebessége 0,7 m/s, és percenként akár 30 felszedésre is képes (4. ábra).
- RBTX-IGUS-0059 2 tengelyű robot, 700 mm munkaterület-átmérővel. A pontossága ±0,5 mm. Legnagyobb hasznos terhelhetősége 5 kg, legnagyobb sebessége 2 m/s, és képes percenként akár 50 felszedés elvégzésére is.
 4. ábra: Háromtengelyű deltarobot egy Igus iRC (balra) mellett (kép: DigiKey)
4. ábra: Háromtengelyű deltarobot egy Igus iRC (balra) mellett (kép: DigiKey)
Csuklós karú kobotok
Az iguverzum a csuklós karú kobotokra (vagy röviden csuklós kobotokra) is kiterjed. A kobotok 2 és 10 vagy több közötti tengelyűek lehetnek. A tengelyeket más néven szabadságfokoknak (DOF, degree of freedom) is nevezik. Általában nagy a munkaterületük, és emberrel együttműködve bonyolult feladatok elvégzésére is képesek. Az Igus REBEL-6DOF-02 típusú robotja 6 szabadságfokú, a REBEL-4DOF-02 típus pedig 4 szabadságfokú. Mindkettő ±1 mm pontosságú, névleges munkavégzési tartománya 400 mm, és 200 mm/s egyenes vonalú sebesség mellett legalább 7 felszedésre képes percenként.
A 6 szabadságfokú (6 tengelyű) típus legnagyobb hasznos terhelhetősége 2 kg, legnagyobb munkavégzési távolsága pedig 664 mm. A 4 szabadságfokú típus legnagyobb hasznos terhelhetősége 3 kg, legnagyobb munkavégzési távolsága pedig 495 mm (5. ábra).
 and 6 DOF (right)") 5. ábra: Egy 4 (balra) és egy 6 szabadságfokú (jobbra) csuklós karú robot (kép: Igus)
5. ábra: Egy 4 (balra) és egy 6 szabadságfokú (jobbra) csuklós karú robot (kép: Igus)
Összegzés
A jól átlátható ipari metaverzum, az iguverzum a digitális ikreket és a virtuális valóságot ötvözi, hogy olyan eszközöket tegyen elérhetővé, amelyek lehetővé teszik robotikai megoldások gyors fejlesztését és bevezetését. Ingyenes, nem kér licencet, és úgy van megtervezve, hogy helyben, felhőkapcsolat nélkül fusson a számítógépen. Robotikai megoldások fejlesztésére és tesztelésére használható a robot fizikai jelenléte nélkül.
A deltarobotok, a portálrobotok, a robotkarok (kobotok) és a SCARA robotok mozgásrendszerének széles skáláját támogatja. Az iRC az automatizálási és üzemeltetési igények támogatása érdekében számos illesztőfelületet is tartalmaz, többek között PLC-illesztő, Modbus TCP/IP, CRI Ethernet, ROS-illesztő, objektumérzékelő kamerákhoz való illesztőfelület és felhőillesztő is található benne. Az iguverzum, az iRC és az Igus ezekhez kapcsolódó robotjai a kis- és közepes vállalkozások alacsony költségű automatizálási igényeinek támogatására lettek optimalizálva.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.